Sat Jul 26 08:30:46 AM +08 2025 #90 ✎
/|\
/|\
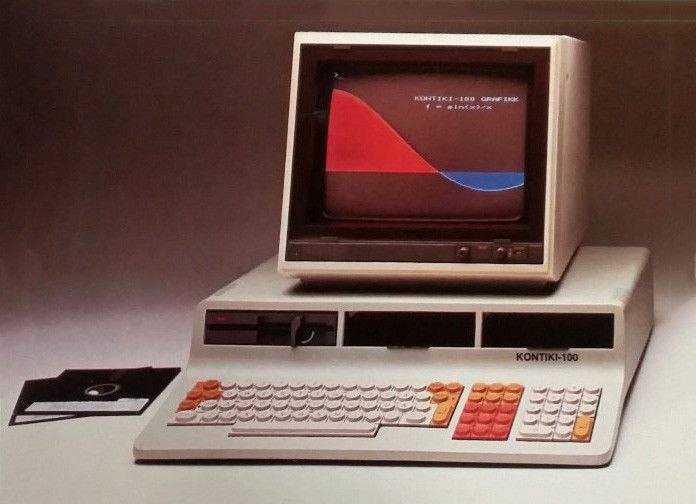
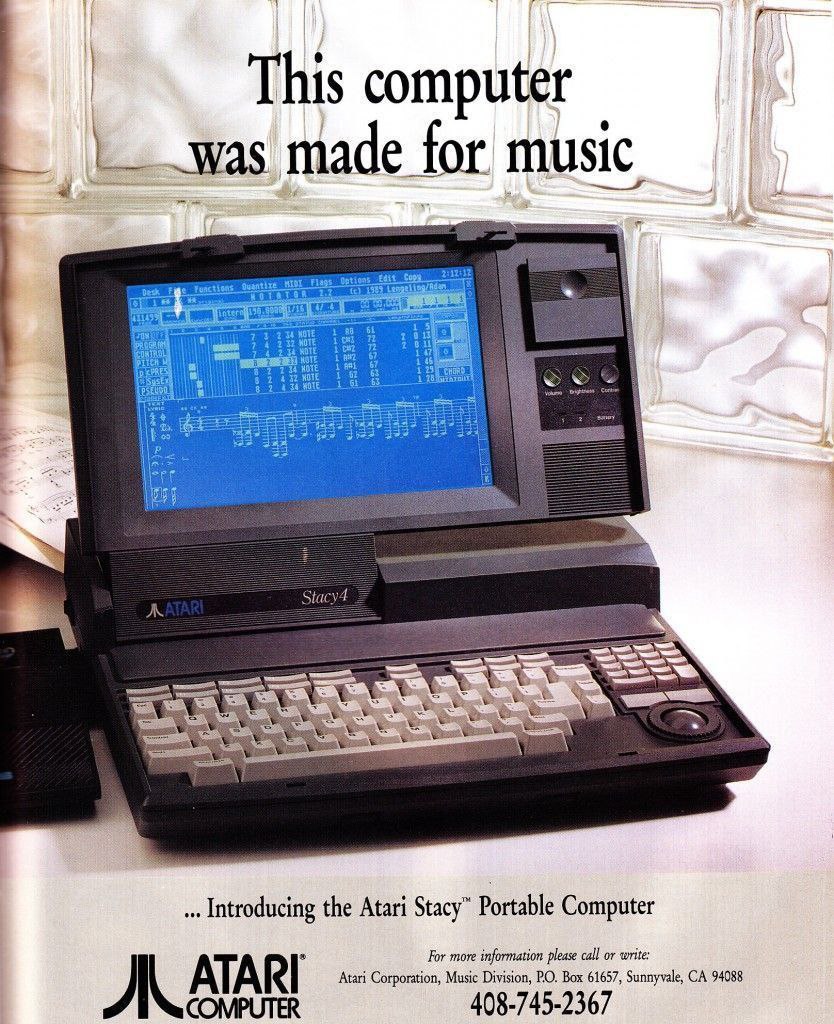
Tiki-100
generator_a
.zip(generator_b)
.take(5_000_000)
.map(|(a, b)| ((a ^ b) & 0xFFFF == 0) as usize)
.sum()
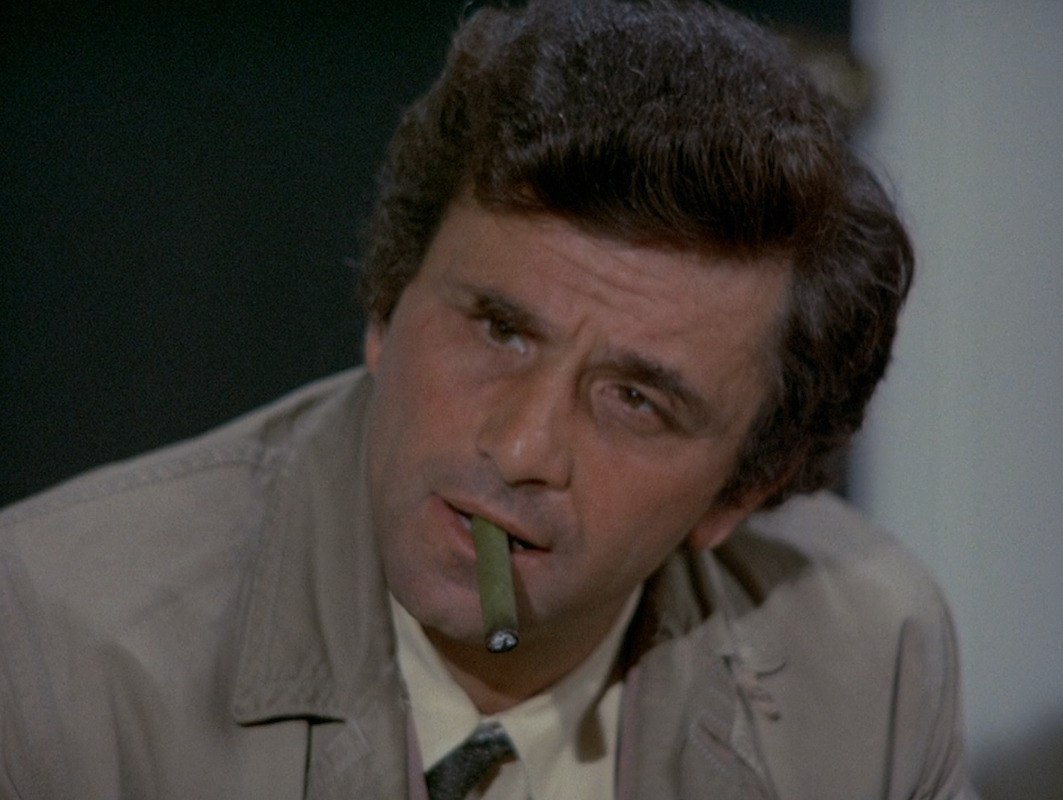
Columbo

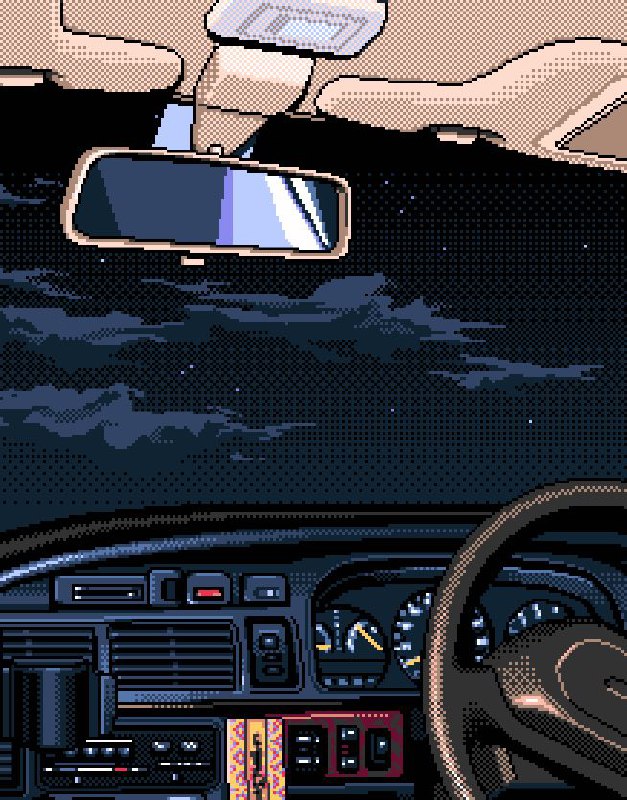
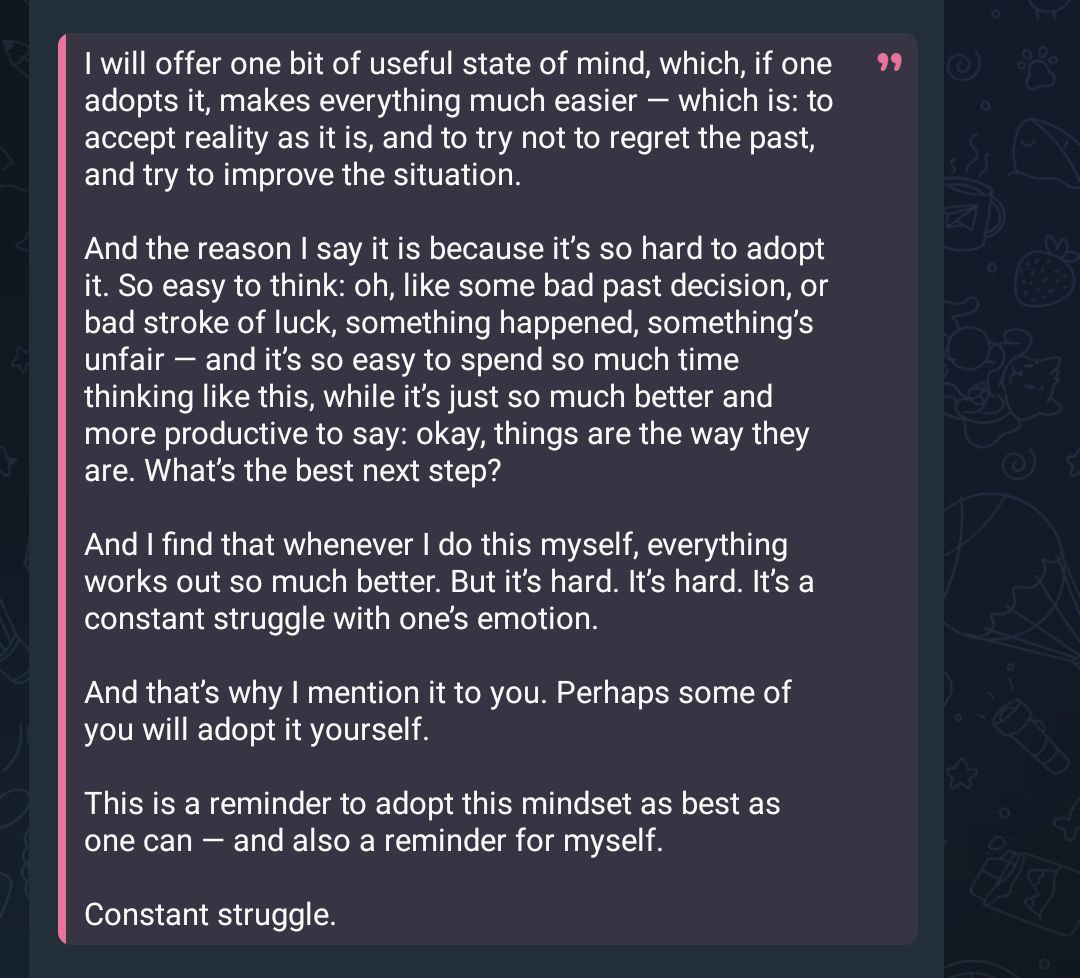
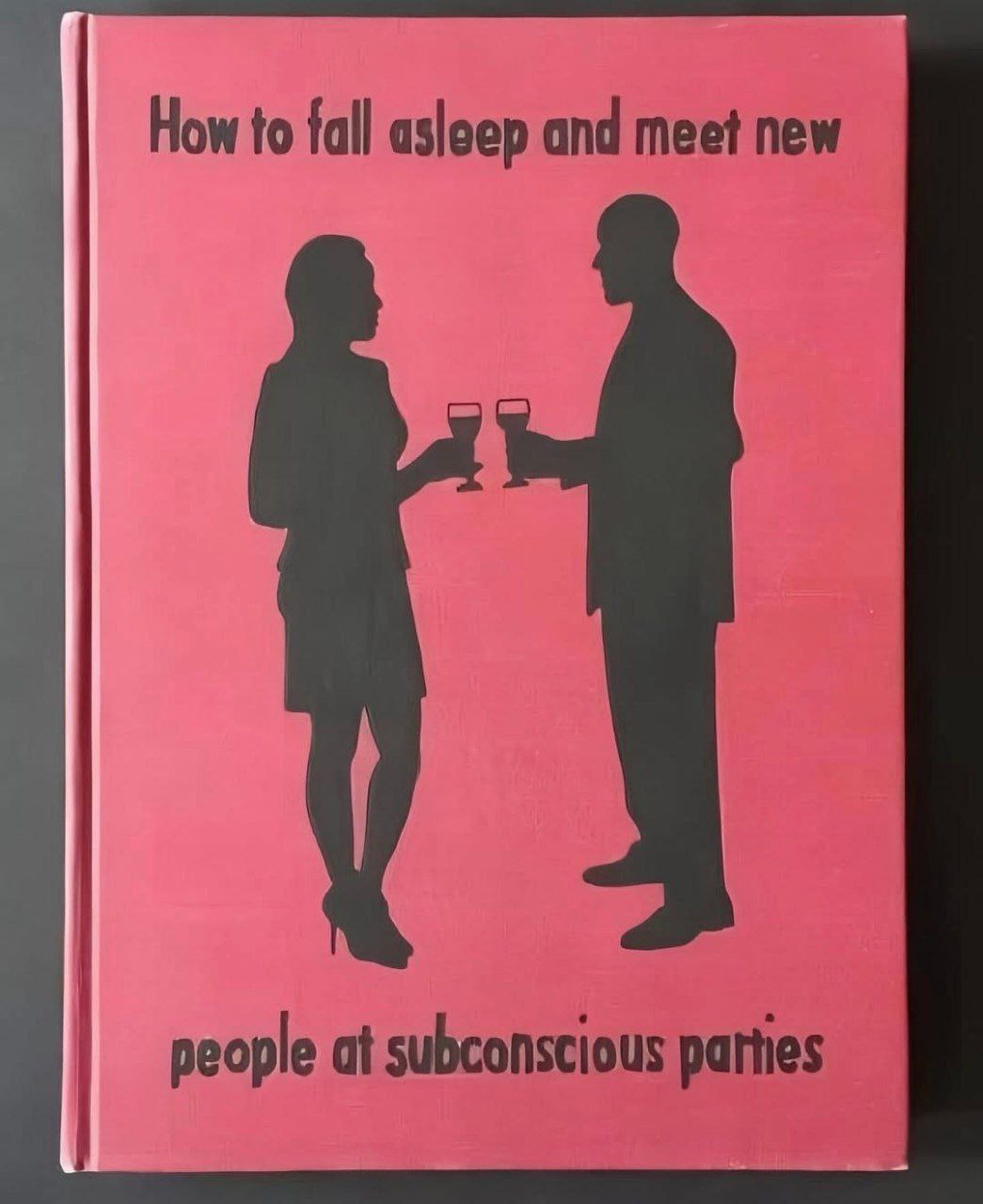
dream
Lorem Gibson Shibuya assault kanji knife fetishism nano- neon. crypto- A.I. man city corrupted A.I. rain. tank-traps network digital advert uplink free-market garage. BASE jump plastic bicycle narrative singularity free-market pen. nano- range-rover euro-pop RAF plastic warehouse cyber-. car Chiba hotdog tube pistol Kowloon corrupted. dolphin RAF man artisanal nano- bomb uplink.
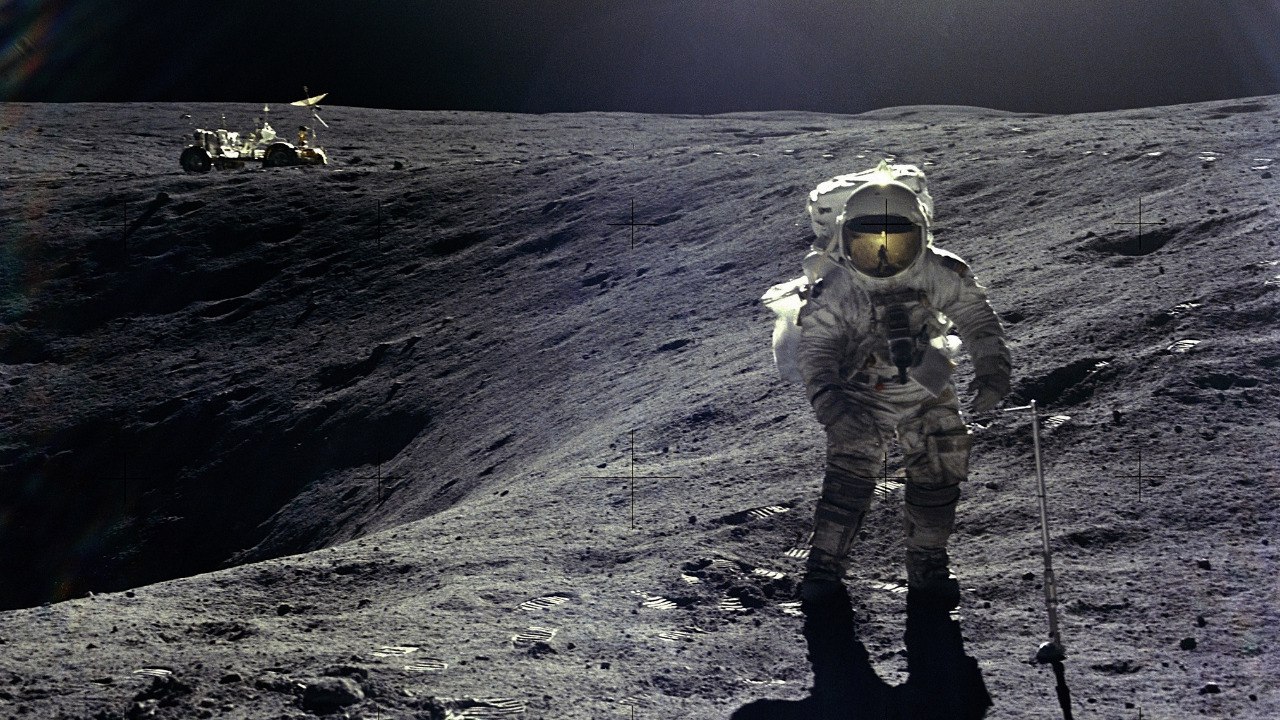
NASA

repeat
https://github.com/aldanor/aoc-2021 https://en.wikipedia.org/wiki/Hacker's_Delight https://github.com/astral-sh/uv/pull/13469


Keypro II, 1982
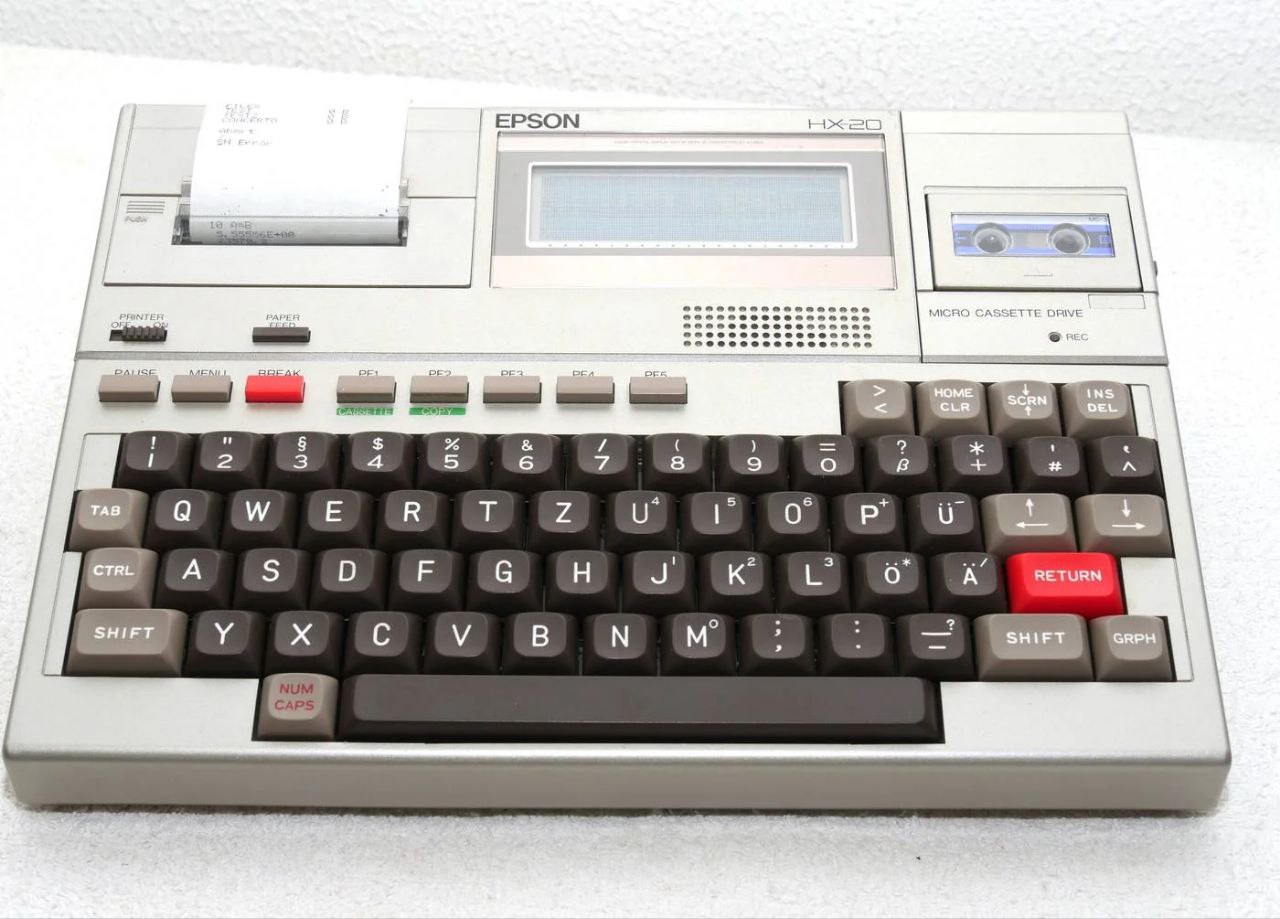
Epson HX-20
yeah

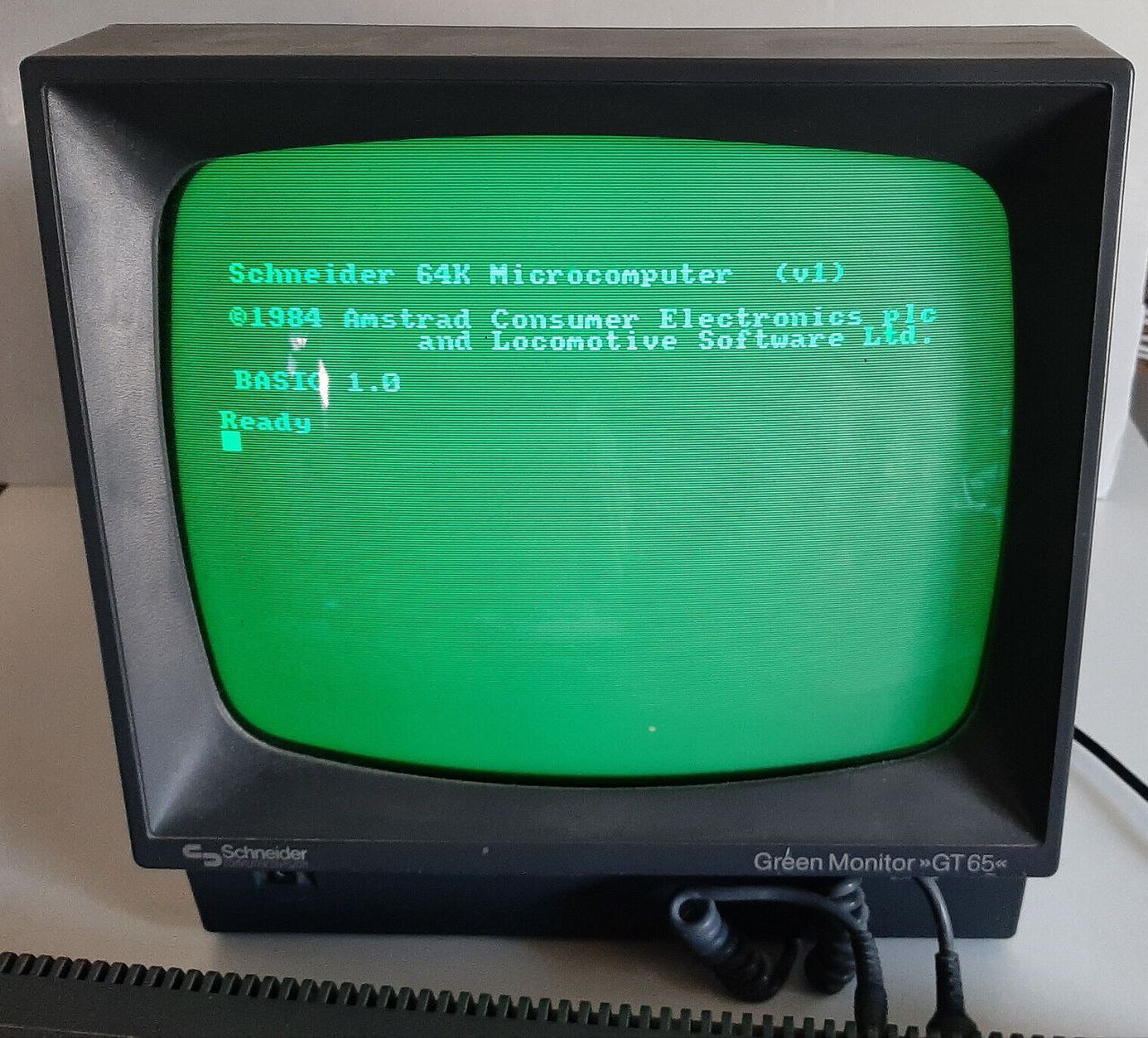
Schneider CPC 464

hehe

IBM Selectric I
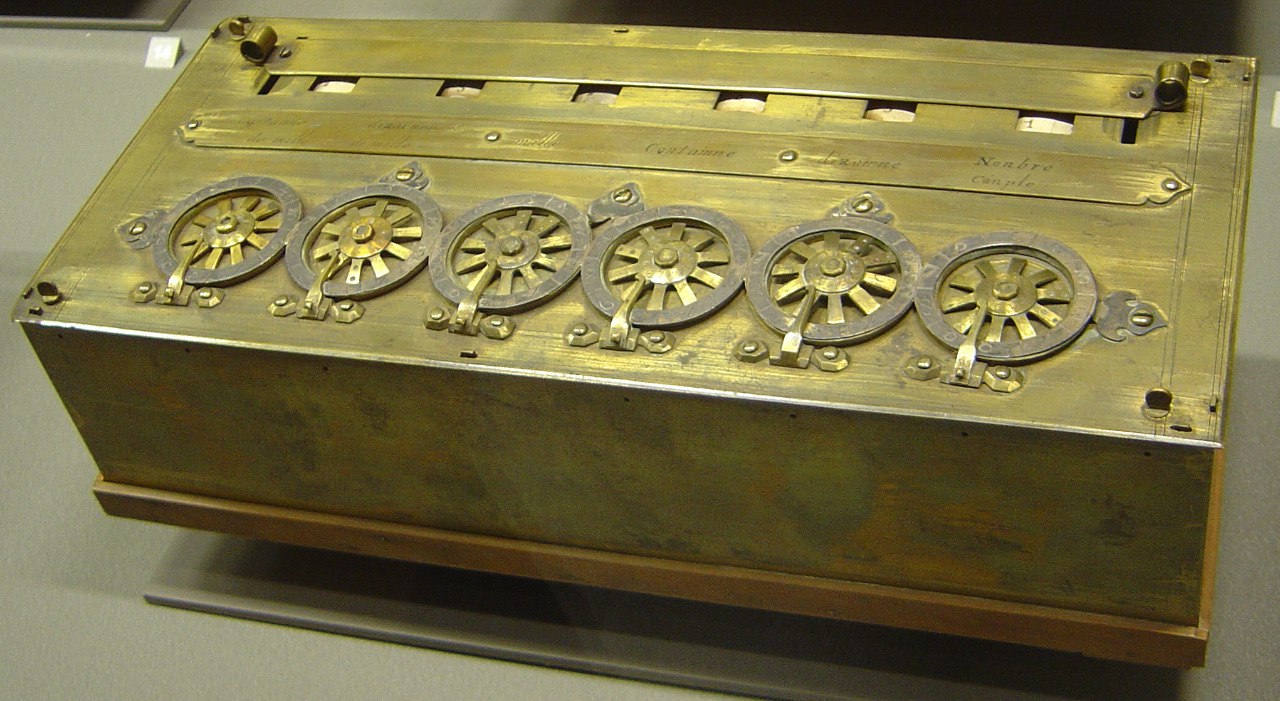
Arts_et_Metiers_Pascaline_dsc03869.jpg

DEC Digital VT100

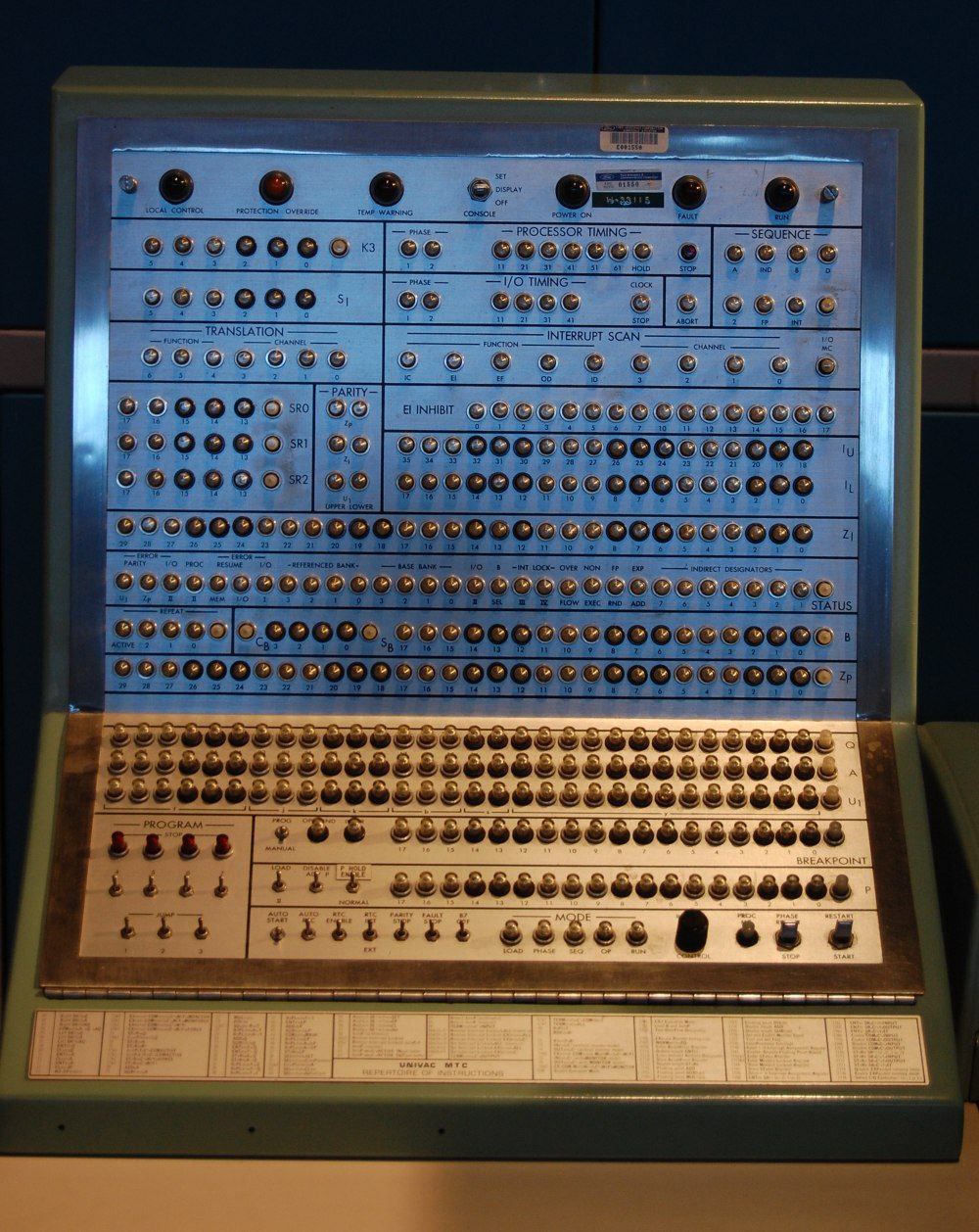
Connection Machine (1985)